以上觀點(diǎn)為戲謔打趣之言,但也基本反映出從業(yè)者及行業(yè)外人士的一個大致觀點(diǎn)。或許在未做蝸小白產(chǎn)品之前我也持有這種觀點(diǎn),但隨著小白量產(chǎn)及數(shù)百臺的投放應(yīng)用,不斷地接受到市場及用戶的千錘百煉,才意識到認(rèn)為“L4特種車輛沒有技術(shù)挑戰(zhàn)”是一種天真的技術(shù)思維,不知道做一個真正能用產(chǎn)品是多么復(fù)雜。
以下列舉蝸小白在運(yùn)營經(jīng)常遇到的場景:臨時施工堵塞、異形障礙物、下水井蓋丟失、行人突發(fā)干擾、雨中漫步。
從技術(shù)及算法挑戰(zhàn)而言,這種需要適應(yīng)各種天氣溫度、非結(jié)構(gòu)化道路、非交通規(guī)則約束、非人為受控場景遠(yuǎn)比結(jié)構(gòu)化道路高速自動駕駛及室內(nèi)機(jī)器人要大許多。不僅如此,為了實現(xiàn)正向商業(yè)模型,整車BOM成本要控制在萬元級別,使用壽命則要達(dá)4-5年(部分耗材視情況進(jìn)行更換)。因此,在質(zhì)量、成本、供應(yīng)鏈等多種約束條件,數(shù)百臺車輛每日工作6小時以上,累計自動駕駛里程達(dá)數(shù)十萬公里,將蝸小白活活“倒逼“成為地表最強(qiáng)無人駕駛掃地車輛。
同時作為一臺替代或減輕人工作業(yè)的自動化車輛,最優(yōu)目標(biāo)為全車身架構(gòu)及模塊都專為無人駕駛設(shè)計的全新物種,而不是在現(xiàn)成清掃車輛上進(jìn)行改裝。一個最易懂的例子為前者無需考慮駕駛員座位空間,因此可設(shè)計為水箱或電池空間來增加有效作業(yè)半徑,而后者處處受制于為“駕駛員需求”約束。在當(dāng)前全世界范圍內(nèi)同類產(chǎn)品中,蝸小白屬于前者,其它屬于后者。對于電子電器架構(gòu)及傳感器設(shè)計,更是需要緊密圍繞無人駕駛+清掃兩個要求來協(xié)同設(shè)計,以提高產(chǎn)品功能及質(zhì)量,從這個意義上來講蝸小白一定是世界上首臺產(chǎn)品級無人駕駛專用清掃車輛。
本系列文章將對蝸小白技術(shù)及質(zhì)量等能力進(jìn)行全面介紹,其目標(biāo)為讓客戶及行業(yè)朋友更加了解蝸小白,也希望能提出更多有益建議幫助小白發(fā)展(當(dāng)然也希望介紹更多客戶啦)。
主要包括以下幾部分:
• 傳感器及電子電器架構(gòu)
• 自動行走能力
• 自動清掃能力
• 遠(yuǎn)程云控能力
• 生產(chǎn)制造能力
• 整體質(zhì)量能力
第一章 傳感器及電子電器架構(gòu)
一、傳感器選型及布置
標(biāo)準(zhǔn)蝸小白版本傳感器中:
① 感知:采用激光、視覺及超聲波融合感知方案;
② 定位:采用組合導(dǎo)航、激光及視覺SLAM融合定位方案;
③ 遠(yuǎn)程監(jiān)控及平行駕駛:采用前向及環(huán)視視覺作為信號源;
車頂16線激光不僅負(fù)責(zé)障礙物檢測識別,還承擔(dān)激光SLAM定位;同樣,前向視覺也同時負(fù)責(zé)障礙物檢測識別及視覺SLAM工作;環(huán)視廣角負(fù)責(zé)遠(yuǎn)程監(jiān)控及平行駕駛。
整車傳感器均按照車規(guī)級要求設(shè)計,視覺、超聲波等傳感器均選用量產(chǎn)乘用車供應(yīng)商產(chǎn)品,滿足高低溫及環(huán)境各項嚴(yán)苛要求。

二、電子電器架構(gòu)
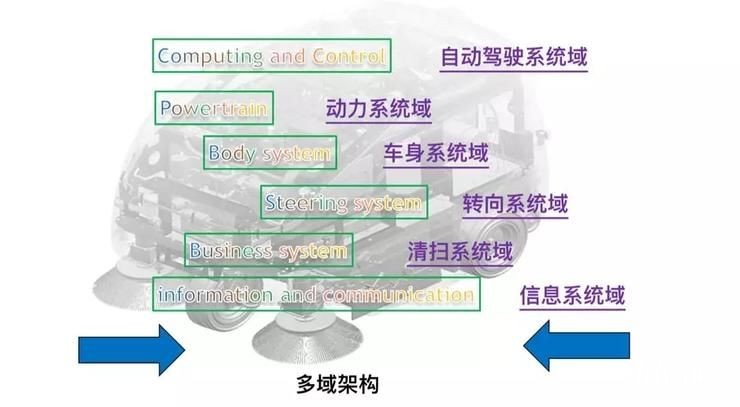
按照乘用車電子電器架構(gòu)設(shè)計思路,將蝸小白分為以下域:自動駕駛域、動力系統(tǒng)域、車身系統(tǒng)域、轉(zhuǎn)向系統(tǒng)域、清掃系統(tǒng)域及信息系統(tǒng)域。其中:動力、車身、轉(zhuǎn)向及信息屬于支撐域,自動駕駛及清掃屬于功能域。
這種多域架構(gòu)好處在于可以分工協(xié)調(diào),讓各個方向?qū)<覅f(xié)調(diào)作戰(zhàn)。同時也可以看出,蝸小白雖小,但五臟俱全,整車系統(tǒng)包括多個總成及上千個零部件,對質(zhì)量和品控有極高要求,否則上層AI算法再先進(jìn)也只有歇菜。
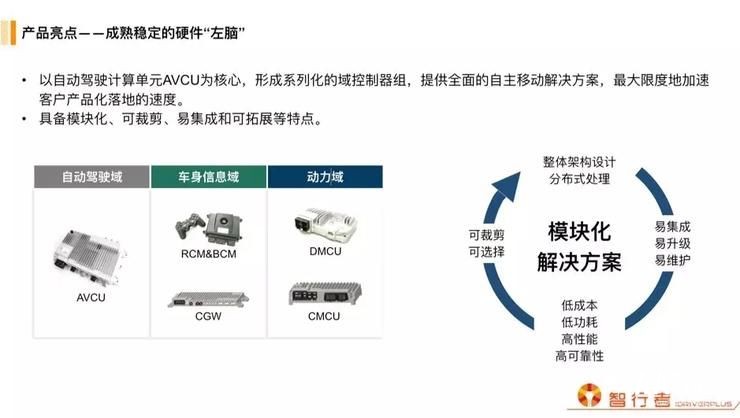
各個域分別對應(yīng)域控制器、網(wǎng)絡(luò)通信及外設(shè)接口,目前智行者低速自動駕駛計算套件已形成標(biāo)準(zhǔn)化套件產(chǎn)品LADS,下圖中左腦即為域控制器集群,右腦則為軟件及算法套件。

下圖為各域包括的控制器,以自動駕駛計算單元AVCU為核心,形成系列化的域控制器組,提供全面的自主移動解決方案,最大限度地加速客戶產(chǎn)品化落地的速度。具備模塊化、可裁剪、易集成和可拓展等特點(diǎn)。
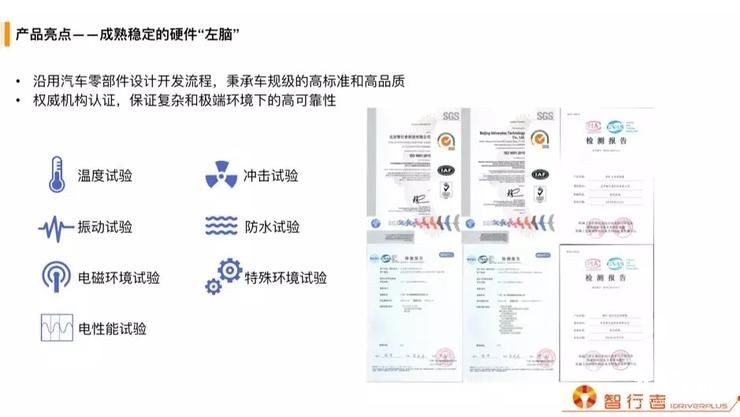
沿用汽車零部件設(shè)計開發(fā)流程,秉承車規(guī)級的高標(biāo)準(zhǔn)和高品質(zhì),權(quán)威機(jī)構(gòu)認(rèn)證,保證復(fù)雜和極端環(huán)境下的高可靠性。
LADS適合于多種低速車輛,包括環(huán)衛(wèi)、物流及安防等,是跨平臺的獨(dú)立計算套件,接口豐富,可以作為貨架產(chǎn)品給客戶提供,有合作興趣伙伴可選購采用。
三、 接口線束設(shè)計
對于傳統(tǒng)量產(chǎn)車輛,線束接口設(shè)計及質(zhì)量非常重要;但在自動駕駛?cè)Γ赡苁亲钊菀缀雎缘牟糠帧?/p>
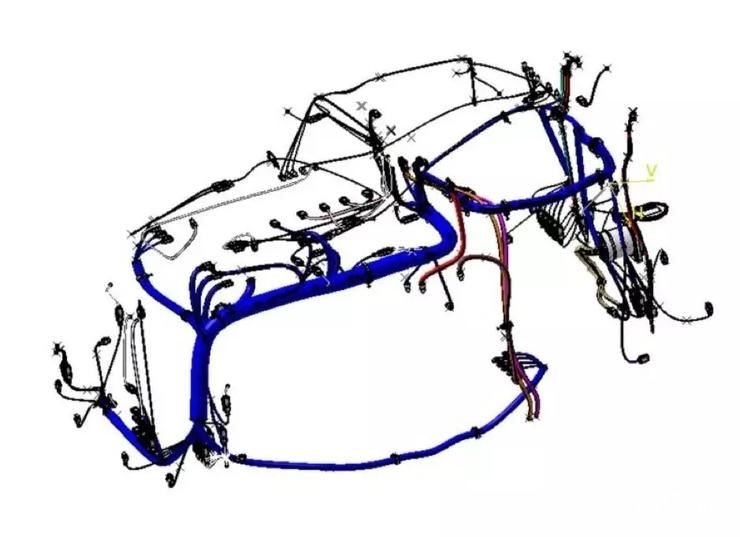
在蝸小白正向設(shè)計中,線束設(shè)計均采用乘用車級別設(shè)計流程,采用線束原理圖設(shè)計,整車線束3D圖紙設(shè)計,而后生產(chǎn)2D圖紙輸出加工。如下圖所示,藍(lán)色線束即為整車線束,全部采用采用車規(guī)級連接器,安全可靠,并進(jìn)行干涉校核及工藝性校核來保障質(zhì)量。所有線束全部由專業(yè)的車規(guī)級供應(yīng)商進(jìn)行生產(chǎn),采用專業(yè)導(dǎo)通臺進(jìn)行100%檢驗。
舉個栗子,常規(guī)Velodyne激光的電源及接口是下圖這樣子的,這種普通電源及網(wǎng)口顯然是無法勝任長時間震動應(yīng)用環(huán)境,相信這也是許多自動駕駛研發(fā)者遇到的問題。

velodyne電源適配器

數(shù)據(jù)及電源接口
但在量產(chǎn)車型里顯然不能采用這種方案,智行者同Velodyne一起設(shè)計車規(guī)級接插件來保證絕對可靠性,這也是全球范圍內(nèi)Velodyne 16線激光雷達(dá)第一次大范圍進(jìn)行車規(guī)級接插件設(shè)變及應(yīng)用。

蝸小白velodyne車規(guī)級插頭
目前蝸小白已100% 完成車規(guī)級接口設(shè)計及供應(yīng)商配合改進(jìn)工作,在最新量產(chǎn)版本中下線車輛將不包括一條消費(fèi)級USB、網(wǎng)口及電源等接口,最大程度保證數(shù)據(jù)傳輸可靠性。