如今,作為人工智能另一重要分支的自動駕駛,同樣繼承了這兩樣法寶。
在人工智能的世界里。要想跑得好先要跑得多。一輛車縱使渾身上下全是雷達和攝像頭,也只是具備了自動駕駛的“發(fā)達四肢“,行駛中采集的實時數(shù)據(jù)需要通過聰明的大腦來分析,才能得出正確判斷。而這個大腦,需要大量的數(shù)據(jù)來進行訓練,正如AlphaGo吃盡了數(shù)百萬人類棋譜,并不斷進行自我對弈、自我訓練,才鍛煉出這顆近乎完美的大腦。
具體到自動駕駛,數(shù)據(jù)最重要的兩個來源則是真實世界的行車數(shù)據(jù)和虛擬世界的模擬器訓練,二者缺一不可,共同驅(qū)動自動駕駛的不斷進化。
測試車、量產(chǎn)車:跑出來的數(shù)據(jù)
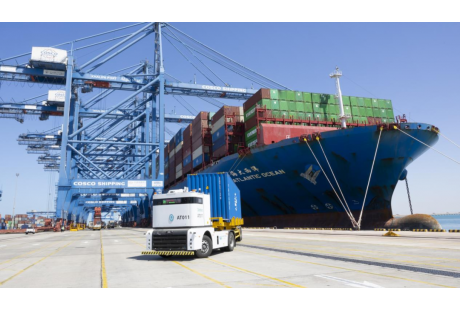
真實的行車數(shù)據(jù)很好理解,它主要來源于自動駕駛測試車隊和已經(jīng)上路的量產(chǎn)車的真實數(shù)據(jù)。
得益于科技公司、車企在自動駕駛方面的不斷投入,在國內(nèi)一些城市,頂著旋轉(zhuǎn)的小攝像頭穿梭于大街小巷的測試車越來越常見。它們?yōu)樽詣玉{駛收集了大量真實的行駛數(shù)據(jù)。根據(jù)前不久由北京智能車聯(lián)產(chǎn)業(yè)創(chuàng)新中心發(fā)布的《北京市自動駕駛車輛道路測試報告(2019年)》顯示,截止2019年年底,各企業(yè)進行自動駕駛路測的車輛累計達到77輛,測試總里程超過104萬公里(其中百度憑借52 輛測試車輛,75.4 萬公里的全年測試里程占據(jù)絕對優(yōu)勢)。
在2月末,加州機動車輛管理局(California Department of Motor Vehicles)也發(fā)布了一批2019年自動駕駛汽車的測試報告,列舉了Waymo、GM Cruise、蘋果、Uber等公司在加州的公共道路上開展測試的行駛英里數(shù),從數(shù)萬到數(shù)十萬不等。
可以說,自動駕駛的路試在全球范圍內(nèi)正如火如荼,這些行駛數(shù)據(jù)精確而全面,是最具有含金量的。
除了主動測試,每天奔跑在全球各地的汽車也是一座無比巨大的數(shù)據(jù)金礦。受傳統(tǒng)觀念和技術(shù)的限制,它們并沒有被開發(fā)利用或僅僅開發(fā)了一小部分。而隨著自動駕駛的逐漸逼近,這些數(shù)據(jù)的力量將迅速崛起。
舉個最典型的例子,最具科技基因的車企特斯拉在最開始的產(chǎn)品設(shè)計理念上便極其重視行駛數(shù)據(jù),通過其全球用戶使用Autopilot的行駛數(shù)據(jù)反過來訓練并完善其自動駕駛系統(tǒng),形成了非常成熟的數(shù)據(jù)閉環(huán)。每一輛奔跑著的特斯拉都在源源不斷地為其提供“數(shù)據(jù)原油”。
如今這也是特斯拉最大的優(yōu)勢之一——讓我們通過數(shù)量級的對比來感受一下:截止到2020年1月,特斯拉已采集超過20億英里的行駛數(shù)據(jù),相比之下最強的對手谷歌Waymo,僅收集了2000萬英里的行駛數(shù)據(jù)。而上文提到的測試車輛呢?100萬英里已是頂尖水平。
當然,在這一方面,“傳統(tǒng)”車企以及網(wǎng)約車公司(國外的Uber、國內(nèi)的滴滴等)也在不斷利用各自的優(yōu)勢不斷發(fā)力。
“虛擬”的世界,“真實”的數(shù)據(jù)
除了積累真實世界中的數(shù)據(jù),建立在計算機上的模擬仿真測試也在變得越來越重要。
簡單來講,自動駕駛的模擬仿真測試就是通過軟件模擬車輛性能和操控、交通道路狀況乃至天氣、環(huán)境等各項參數(shù),讓車輛在虛擬世界中行駛并積累經(jīng)驗——這很容易讓人聯(lián)想到一些模擬賽車類游戲。從形式上看,二者的確是相通的。騰訊的自動駕駛仿真系統(tǒng)TAD Sim(Tencent Autonomous Driving Simulator)便結(jié)合了專業(yè)的游戲引擎。如同一部大型的RPG游戲,來還原足夠真實的場景。
模擬仿真測試的優(yōu)勢非常明顯。
其一,它可以在短時間內(nèi) “喂給”自動駕駛極其龐大的數(shù)據(jù)。在計算機能力愈發(fā)強大的今天,模擬訓練是非常高效的數(shù)據(jù)獲取手段。畢竟它不需要遵循現(xiàn)實世界中的時間,且可以多線程同步運行。據(jù)數(shù)據(jù)顯示,Waymo公司的模擬自動駕駛測試總里程在2019年7月就已經(jīng)達到了100億英里,而在2018年9月時,這一數(shù)字還是50億英里。
其二,它可以測試極端情況,同時規(guī)避測試車輛的風險。有些極端場景(如惡劣天氣、稀有地形、特殊事故等)可遇不可求且費時費力。實際測試時還有可能會對車輛、人員和周圍環(huán)境造成危害。
其三,針對某些場景可以節(jié)約經(jīng)濟成本,一切都在計算機上運行,不再需要派出車輛和人力,并協(xié)調(diào)相關(guān)的測試場地。
可以說,模擬仿真測試已經(jīng)成為自動駕駛必不可少的工具。然而縱觀這些優(yōu)勢,我們又并不能得出“模擬仿真測試可以完全取代實際測試”的結(jié)論。
即使圍棋再復雜,它終究是一個縱橫交錯絕對規(guī)律且“有限”的世界。而真實世界的各項參數(shù)則是時刻變化、無窮無盡的。個體的行為無法精確預測,道路環(huán)境每天都不一樣。
因此,自動駕駛?cè)孕枰獙嶋H的經(jīng)驗數(shù)據(jù)和數(shù)學模型共同來回答,甚至可以說,仿真模擬測試應該更多的起到輔助作用。
依據(jù)目前的經(jīng)驗和理論,我們還無法斷言在這兩個引擎的驅(qū)動下,自動駕駛最終會發(fā)展為什么形態(tài)。但虛擬與現(xiàn)實并駕齊驅(qū)的發(fā)展模式正日漸明晰。