華為全路況自動駕駛導(dǎo)航專利獲授權(quán)
時間:2021-06-15
來源:中國網(wǎng)
導(dǎo)語:本發(fā)明是一種自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器,該方法包括:無線網(wǎng)絡(luò)中的無線基站向車載終端發(fā)送差分定位改正數(shù)(202)
6月15日從天眼查獲悉,華為技術(shù)有限公司于日前獲得“自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”專利授權(quán),公告號為CN108027242B,申請日期為2015年11月。

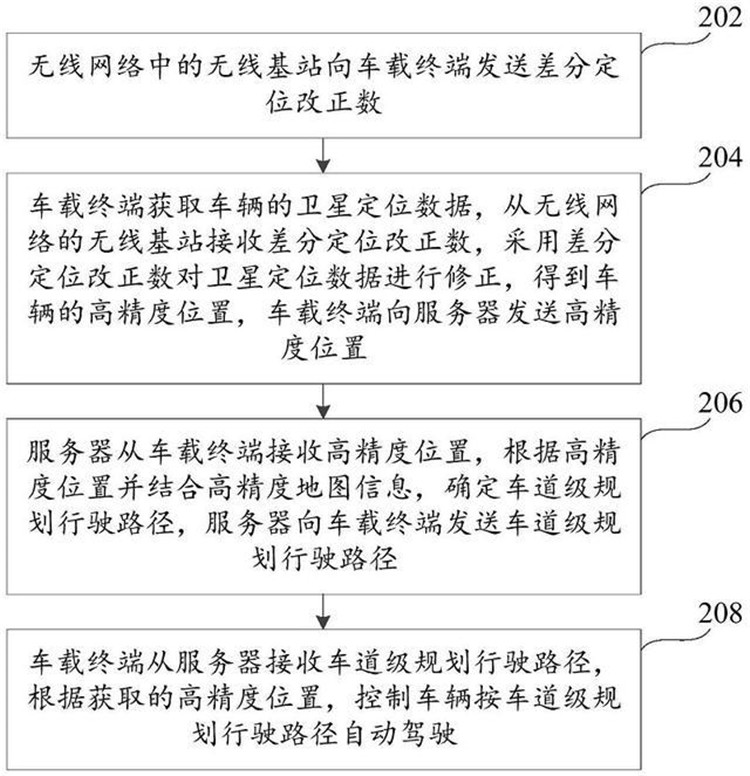
根據(jù)天眼查公開資料顯示,該專利摘要為:本發(fā)明是一種自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器,該方法包括:無線網(wǎng)絡(luò)中的無線基站向車載終端發(fā)送差分定位改正數(shù)(202);車載終端獲取車輛的衛(wèi)星定位數(shù)據(jù),從無線網(wǎng)絡(luò)的無線基站接收差分定位改正數(shù),采用差分定位改正數(shù)對衛(wèi)星定位數(shù)據(jù)進(jìn)行修正,得到車輛的高精度位置,車載終端向服務(wù)器發(fā)送高精度位置(204);服務(wù)器從車載終端接收高精度位置,根據(jù)高精度位置并結(jié)合高精度地圖信息,確定車道級規(guī)劃行駛路徑,服務(wù)器向車載終端發(fā)送車道級規(guī)劃行駛路徑(206);車載終端從服務(wù)器接收車道級規(guī)劃行駛路徑,根據(jù)獲取的高精度位置,控制車輛按車道級規(guī)劃行駛路徑自動駕駛(208)。采用基于無線網(wǎng)絡(luò)輔助的衛(wèi)星差分定位技術(shù),實現(xiàn)了全天候全路況的自動駕駛導(dǎo)航,且定位精度無需依賴于3D高精度地圖,方案的適應(yīng)性和可靠性顯著增加。
低速無人駕駛產(chǎn)業(yè)綜合服務(wù)平臺版權(quán)與免責(zé)聲明:
凡本網(wǎng)注明[來源:低速無人駕駛產(chǎn)業(yè)綜合服務(wù)平臺]的所有文字、圖片、音視和視頻文件,版權(quán)均為低速無人駕駛產(chǎn)業(yè)綜合服務(wù)平臺獨家所有。如需轉(zhuǎn)載請與0755-85260609聯(lián)系。任何媒體、網(wǎng)站或個人轉(zhuǎn)載使用時須注明來源“低速無人駕駛產(chǎn)業(yè)綜合服務(wù)平臺”,違反者本網(wǎng)將追究其法律責(zé)任。
本網(wǎng)轉(zhuǎn)載并注明其他來源的稿件,均來自互聯(lián)網(wǎng)或業(yè)內(nèi)投稿人士,版權(quán)屬于原版權(quán)人。轉(zhuǎn)載請保留稿件來源及作者,禁止擅自篡改,違者自負(fù)版權(quán)法律責(zé)任。
如涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一周內(nèi)與本網(wǎng)聯(lián)系,否則視為放棄相關(guān)權(quán)利。
下一篇:
聯(lián)邦快遞與Nuro公司研發(fā)無人駕駛送貨車
Nuro周二宣布,它已經(jīng)與聯(lián)邦快遞建立了合作關(guān)系,Nuro自動送貨車將被用于最后一英里的業(yè)務(wù)。