在即將舉行的計算機視覺國際頂級會議CVPR 2022中,飛步科技被錄用了三篇高水平論文,涉及車道線檢測、3D目標(biāo)檢測、少樣本分類等與無人駕駛密切相關(guān)的技術(shù)方向。以下為入選論文介紹。
基于跨層優(yōu)化的車道線檢測方法


掃碼關(guān)注公眾號,隨時了解最新資訊
基于跨層優(yōu)化的車道線檢測方法
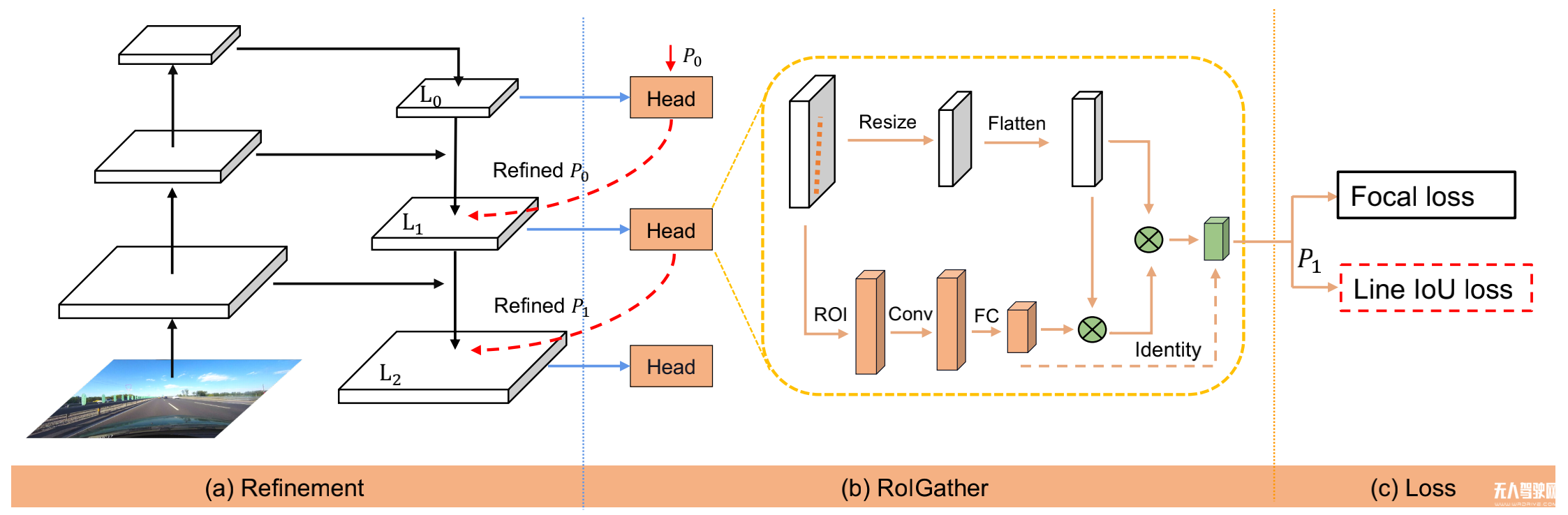
CLRNet: Cross Layer Refinement Network for Lane Detection
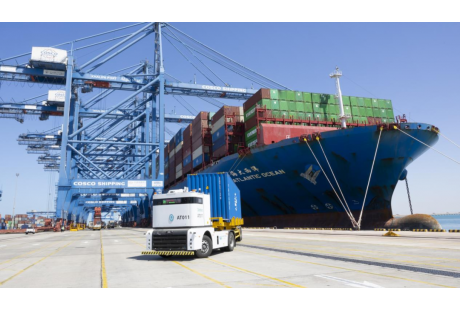
車道線檢測是無人駕駛系統(tǒng)感知模塊的重要功能,由搭載在車身上的視覺攝像頭來完成,感知結(jié)果常用來進行輔助定位。車道線檢測需要有高層次的語義信息,但車道線特征相對簡單,需要有低層次的特征來精確定位。并且在港口、城市道路等真實場景中,車道線經(jīng)常存在破損、被遮擋等情況。
為了解決上述問題,CLRNet提出了一種結(jié)合高層次和低層次特征的網(wǎng)絡(luò)結(jié)構(gòu),一方面可以感知環(huán)境信息,聚集全局特征,另一方面也能結(jié)合局部的信息精準定位車道線。并且文章提出一種全新的線段交并比損失函數(shù),進一步提升了車道線的定位精度。簡而言之,CLRNet可以幫助無人駕駛系統(tǒng)進行更類人的判斷,精準“修補”出因為遮擋和破損而消失的車道線。
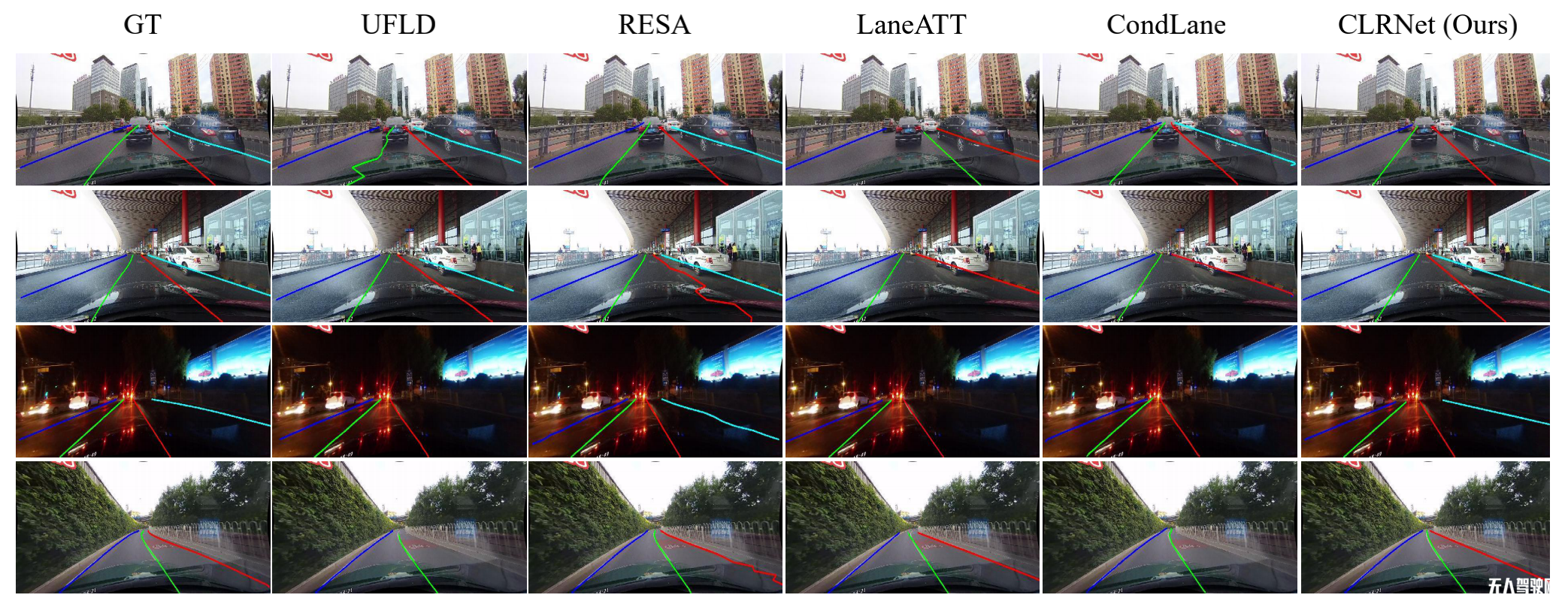
如下圖所示,相比于其他方法,CLRNet可以檢測出完整而連續(xù)的車道線。大量實驗證明,論文提出的方法取得了遠超越當(dāng)前最先進方法的性能表現(xiàn)。
論文地址:https://arxiv.org/abs/2203.10350
基于互中心化學(xué)習(xí)的少樣本分類方法
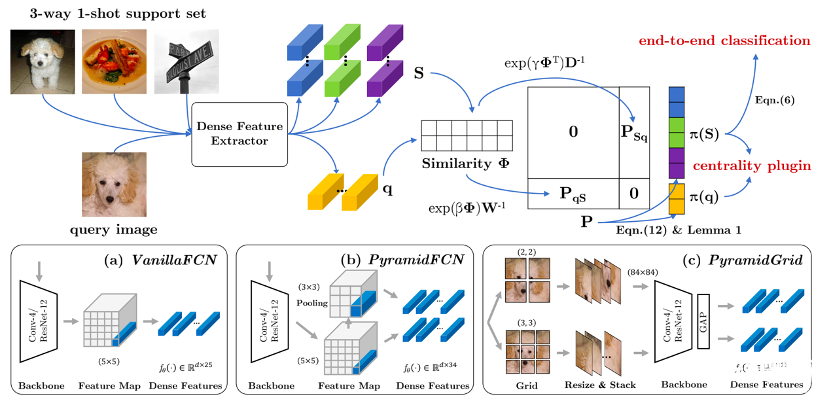
Learning to Affiliate: Mutual Centralized Learning for Few-shot Classification
對于神經(jīng)網(wǎng)絡(luò)來說,需要大量的樣本數(shù)據(jù)來進行學(xué)習(xí)。現(xiàn)階段,無人駕駛系統(tǒng)依靠大數(shù)據(jù)來進行模型學(xué)習(xí),并盡可能在較少的樣本中去做出分類。傳統(tǒng)的方法傾向于使用一個全局特征來密集地表示圖像,而不是使用混合的局部特征。但在實際的無人駕駛作業(yè)場景中,這樣的方法存在著天然的局限性,例如前方車輛車窗掛出了樹枝,但無人駕駛系統(tǒng)可能會將車輛誤檢為一棵樹。
針對上述問題,論文提出了一種全新的互中心化的學(xué)習(xí)(MCL)方法,來更加密切地關(guān)聯(lián)圖像局部特征的稠密表示,針對上述Corner Case有著很好的效果。具體而言,論文假設(shè)每個局部特征是一個可以在離散特征空間中雙向游走的粒子,提出使用局部特征的可達性進行分類任務(wù)。論文證明這種方法與關(guān)系網(wǎng)絡(luò)中的中心性存在緊密的聯(lián)系,且可以通過修改局部特征在全局池化中的權(quán)重來得到更加魯棒的特征表示。經(jīng)過實驗證明,論文方法在各個少樣本分類的數(shù)據(jù)集上達到了最優(yōu)的效果。
論文地址:https://arxiv.org/abs/2106.05517
基于稀疏融合稠密范式的多模態(tài)3D檢測方法
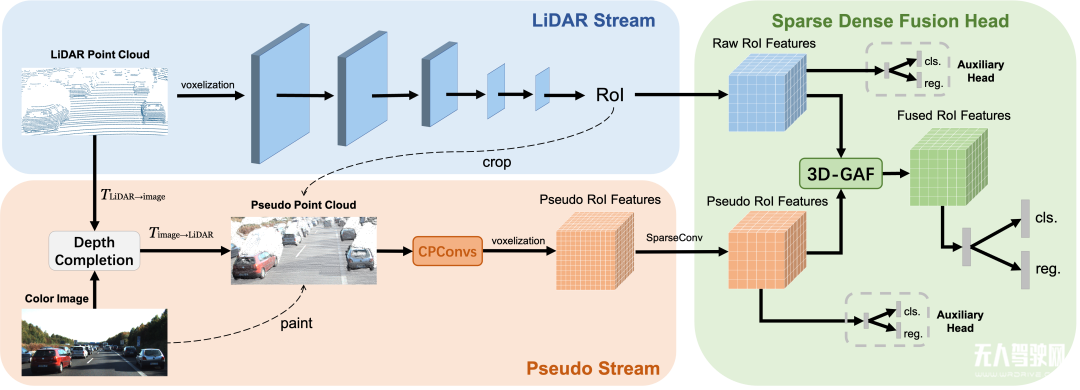
Sparse Fuse Dense: Towards High Quality 3D Detection with Depth Completion
無人駕駛系統(tǒng)中,基于純點云的感知方案,對于遮擋及遠距離的物體往往很難給出準確的檢測結(jié)果,因為這些物體表面的點云通常非常稀疏。
一種可行的解決方案是將點云和高分辨率的圖像進行融合,以此來緩解點云稀疏性的問題。但由于圖像和點云的數(shù)據(jù)格式不同,將二者融合并不容易。
論文提出了一種新穎的多模態(tài)3D檢測框架SFD(Sparse Fuse Dense),其利用深度補全將2D圖片轉(zhuǎn)換成3D偽點云,從而統(tǒng)一了圖像和雷達點云的數(shù)據(jù)表達方式。這使得多模態(tài)方法可以使用更精細的RoI融合策略以及更豐富的數(shù)據(jù)增強。為了充分挖掘偽點云的信息,論文還為偽點云定制了一個高效的卷積。
論文提出的方法有效地彌補了激光雷達的不足,提升了自動駕駛車輛對于場景的理解能力,增強了遮擋和遠距離物體的感知召回率。在KITTI數(shù)據(jù)集的3D目標(biāo)檢測任務(wù)上,論文提出的方法取得了排名第一的成績。
論文地址:https://arxiv.org/abs/2203.09780
掃碼關(guān)注公眾號,隨時了解最新資訊