1 引言
隨著車輛的增加和道路的建設(shè),交通事故量尤其是在交叉路口發(fā)生的事故量在逐年增加。死亡率分析報告系統(tǒng)FARS(Fatality Analysis Reporting System)指出,2009年美國有40.1%的交通事故發(fā)生地點為交叉路口[1]。美國公路交通安全管局的一份報告指出,在2010年,44.1%的交叉路口事故發(fā)生的原因是由于駕駛員的不當(dāng)監(jiān)測和反應(yīng)[2]。公安部的統(tǒng)計數(shù)據(jù)顯示,2012年全國接報涉及人員傷亡的路口交通事故4.6萬起,造成1.1萬人死亡5萬人受傷,分別比2011年上升17.7%、16.5%和12.3%[3]。
無人駕駛汽車通過改變汽車的基本使用方式,協(xié)助預(yù)防交通事故,將人們從大量的駕車時間和隨時面臨的安全威脅中解放出來。無人駕駛汽車大賽(DARPA Grand Challenge)、各大汽車制造商和Goog1e對無人駕駛汽車的發(fā)展注入了先進的技術(shù),并使得無人駕駛汽車真正上路的目標(biāo)逐步變?yōu)楝F(xiàn)實。以Google無人駕駛汽車為例,它于2012年5月獲得了美國首個無人駕駛車輛許可證,并將于2015年~2017年進入市場銷售。然而無人駕駛汽車同樣會碰到如車胎爆裂、油門卡死等突發(fā)狀況,一個微小的狀況也會引起撞車事故。基于此,故障自動保護(也稱為自動防撞協(xié)議)成為無人駕駛汽車研究的一個重要領(lǐng)域。
無人駕駛汽車依靠先進的感應(yīng)技術(shù)以車對車V2V(Vehicle—to—Vehicle)或車對路口V2I(Vehicle—to—Intersection)的形式進行信息傳輸和交互,在感應(yīng)到事故發(fā)生后躲避撞擊的動作需通過計算機程序進行控制。目前存在的無人駕駛車輛的防撞系統(tǒng)在感應(yīng)到路口有事故發(fā)生后,都給出了未進入路口車輛的躲避策略,但對已在路口內(nèi)部的車輛的躲避策略研究得比較少。本文以Dreser和Stone的基于V2I的自治路口管理協(xié)議AIM(Autonomous Intersection Management)L40為對象,對AIM協(xié)議進行改進,以提供防撞機制。
本文結(jié)構(gòu)安排如下:第2節(jié)介紹相關(guān)工作;第3節(jié)對AIM協(xié)議進行簡單介紹;當(dāng)路口狹窄或因車輛擁擠空間較小時,強制轉(zhuǎn)彎可能會引發(fā)更嚴重的撞擊,針對這種情況,第4節(jié)首先給出了這種情況的處理方式,然后對AIM的已有算法進行改進,給出了基于轉(zhuǎn)彎和剎車兩種方式的防撞策略;在第5節(jié)通過一個實例表明改進后的算法能為車輛提供有效的防撞策略;最后第6節(jié)是本文的總結(jié)。
2 相關(guān)工作
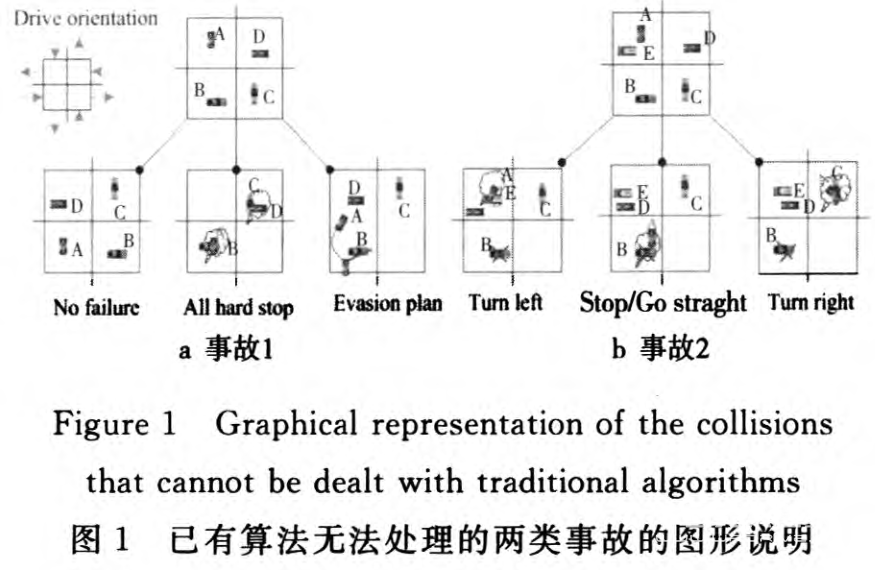
文獻[5~8]等從控制的角度,通過計算在路口內(nèi)部的車輛的最大可控集合給出防撞機制,但它只適用于一輛車進入事故場景的情形,不能為兩輛以上的車輛同時給出防撞策略,而且判斷車輛是否屬于最大可控集合是NP困難的[9]。文獻[10]利用無人機模型給出了多輛車的防撞策略,但是當(dāng)路口車輛較多時,無人機模型的個數(shù)呈指數(shù)式增長,因此這個方法僅適用于路口車輛較少的情況。文獻[11]給出了一個基于時間區(qū)間分配策略的算法,它假設(shè)每輛車有無限多個防撞策略,當(dāng)多輛車需同時產(chǎn)生防撞策略時,他們通過一個算法對每個車輛的防撞策略進行組合,以找出最優(yōu)防撞策略,因此這個算法能處理路口車輛較多的情形。Hafner等人在文獻[12]中給出了一個算法,這個算法以剎車和限速兩種方式確保車輛沒有相撞的可能性。以上的算法在處理下面兩類事故(如圖1所示)時存在不足,如圖1a所示,如果所有車輛沒有出現(xiàn)故障,它們會順利通過路口。但是,當(dāng)車B突然熄火停靠在路口中央時,若采用a11一hard—stop策略,慣性可能會導(dǎo)致車輛發(fā)生碰撞。這種情況下,應(yīng)采用的策略是,車A向右轉(zhuǎn)向,車C和車D繼續(xù)按原計劃行駛。圖1b表示若假設(shè)車E在A的右前方,則路口空間不足,此時若車A向右轉(zhuǎn)向會導(dǎo)致車E和車A的碰撞。為避免兩者相撞,算法應(yīng)為A預(yù)留空間。
3 AIM協(xié)議
本文將對自治路口管理協(xié)議AIM進行改進,基于此協(xié)議和前面介紹的現(xiàn)有防撞策略的不足之處,本文提出一個改進的AIM協(xié)議,并用實驗說明該協(xié)議提供的防撞策略的有效性。本節(jié)將簡單介紹AIM協(xié)議的主要內(nèi)容。AIM協(xié)議定義的關(guān)鍵詞是駕駛員代理DA(Driver Agent,用于控制車輛的程序)和路口管理者IM(Intersection Manager,決定是否接受車輛的預(yù)定)。AIM協(xié)議的核心是預(yù)定方式RM(Reservation Mode)。簡單來說,RM的工作步驟為:
(1)即將駛?cè)寺房诘能嘇向IM發(fā)出一個內(nèi)容為預(yù)計到達時間、車速(<限制速度)、駛?cè)胲嚨馈Ⅰ偝鲕嚨赖男畔ⅲ诵畔⒂脕眍A(yù)定路口的塊(注:AIM將路口按水平垂直的方式等分為塊(Tile),IM根據(jù)A發(fā)出的預(yù)定消息計算A通過路口時經(jīng)過的塊序列(每個時間段都包含一個塊序列)。
(2)根據(jù)以上信息,IM對A的行為進行模擬,以確定A的預(yù)定是否與之前發(fā)出預(yù)定請求的車輛的路線有沖突(注:IM拒絕A的預(yù)定當(dāng)且僅當(dāng)在車輛B已經(jīng)成功預(yù)定該塊,且根據(jù)模擬B使用該塊的時間和A是在同一個時間段內(nèi))。
(3)如果沒有沖突,IM接受A的預(yù)定;若IM未接受A的預(yù)定,A將重新發(fā)送消息,即回到第(1)步,直到IM接受A的預(yù)定。A在穿過路口時,每離開一個塊,就會向IM發(fā)送一個消息,通知該塊已經(jīng)空閑,這樣IM將該空閑塊納入其他車輛占用塊的計算范圍內(nèi)。
4 基于防撞機制CAP的AIM協(xié)議
本節(jié)分兩種情況對AIM協(xié)議進行改進,這兩種情況分別是:基于安全距離的剎車防撞機制;依靠剎車和轉(zhuǎn)彎的防撞機制。
4.1基于安全距離的剎車防撞機制
首先考慮一種簡單情況,即僅靠剎車防撞。這種方式雖然簡單,但在特殊情況下,比如在路口極其狹窄,或路口車輛密度很大時,它是必須的,因為此時轉(zhuǎn)彎可能會造成多輛鄰近車輛的相撞。
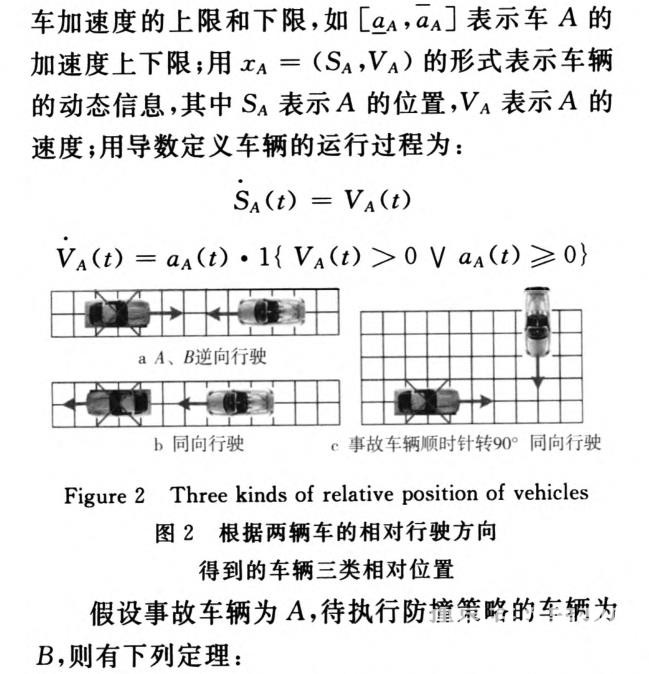
下面按照車輛的相對位置對這種策略進行分類討論,圖2表示了根據(jù)兩輛車的相對行駛方向得到的車輛的三類相對位置。另外,用區(qū)間表示每輛車加速度的上限和下限,如
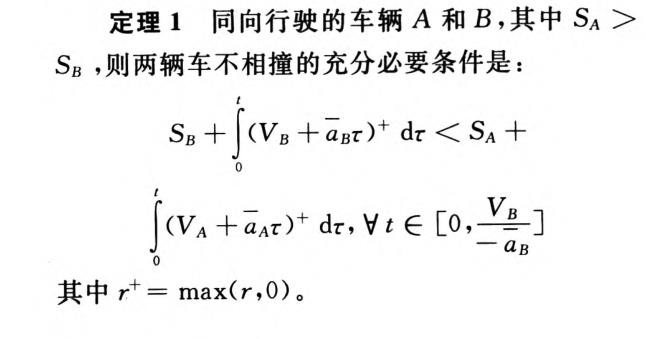
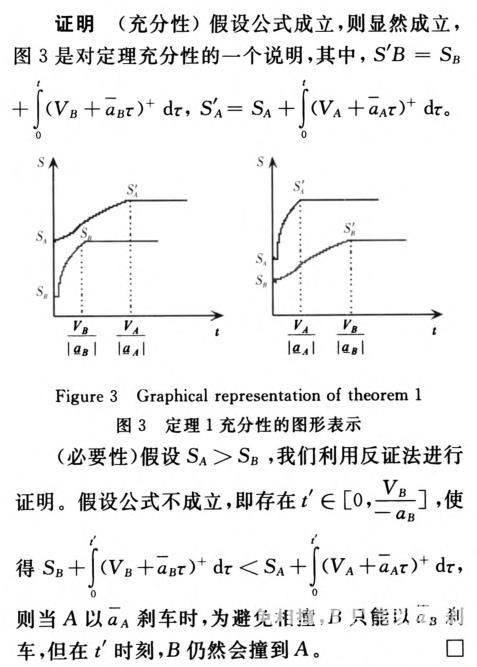


定理4的證明比較簡單,故本文省略。定理1~定理3在現(xiàn)有AIM協(xié)議[4]中是無法實現(xiàn)的,因為在RM中沒有將汽車的安全距離考慮在內(nèi)。根據(jù)以上定理,本文對AIM所做的改進為:根據(jù)塊占用的前后順序,為所有塊計算相鄰車輛的安全距離,在車輛穿過路口時,AIM通過感應(yīng)技術(shù)計算相鄰車輛的安全距離,若小于安全距離,則提示車輛減速。以上改進是合理的,因為我們規(guī)定了它的執(zhí)行條件,即路口寬度小于4m且為同向單車道路口。這種保守的策略保證了無人駕駛車輛的安全性。
4.2依靠剎車和轉(zhuǎn)彎的防撞機制
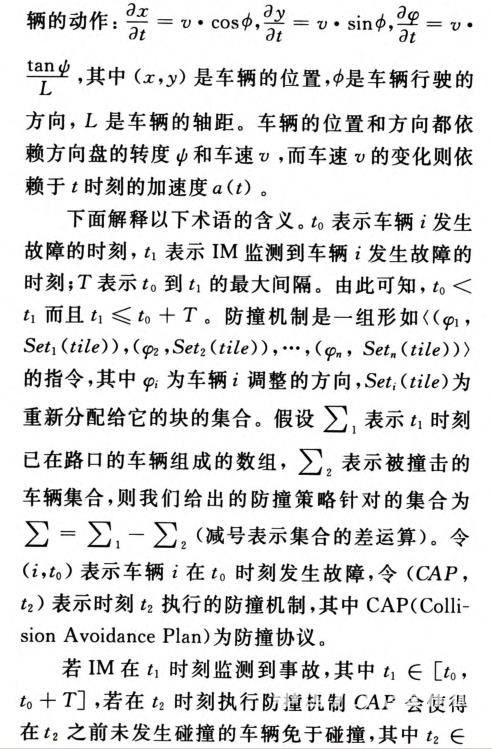
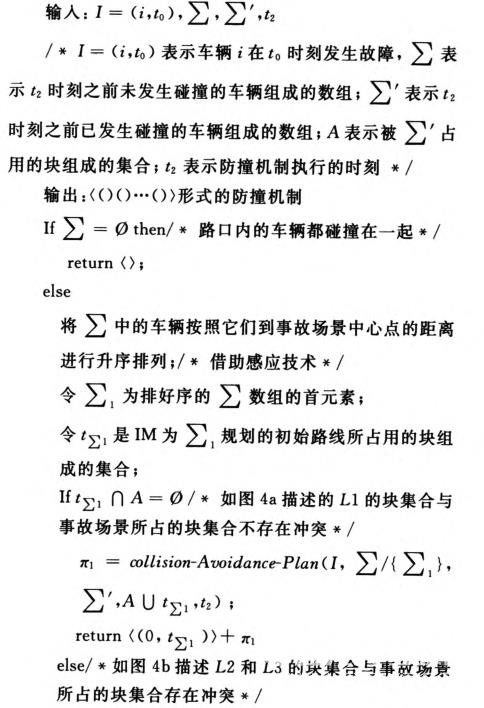
當(dāng)路口寬度大于4 m或為同向多車道路口時,防撞機制不僅可使用依賴安全距離的剎車方式,而且還可以選擇更高效的依靠剎車和轉(zhuǎn)彎的防撞機制。通過一組算法說明本文對AIM調(diào)度策略的改進。首先對車輛的動作進行描述。用微分描述車輛的動作:
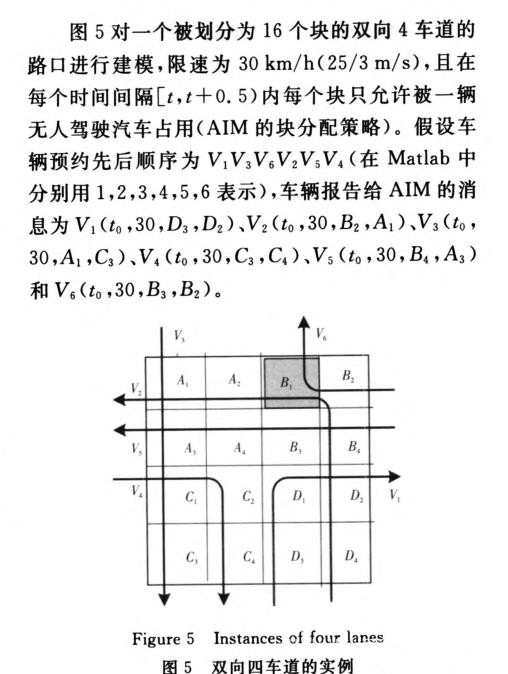
5 實例

6 結(jié)束語
目前存在的無人駕駛車輛的防撞系統(tǒng)在感應(yīng)到路口有事故發(fā)生后,都給出了未進入路口車輛的躲避策略,但對已在路口內(nèi)部的車輛的躲避策略的研究比較少。自治路口管理協(xié)議AIM的防撞機制也不能有效地為路口內(nèi)部的車輛給出躲避策略。本文設(shè)計的算法根據(jù)事故發(fā)生的時間、監(jiān)測到故障的時間和給出防撞策略的時間為路口每個車輛單獨設(shè)計防撞策略,與傳統(tǒng)的計算最大防撞集合的做法相比,不會因為算法的不同造成策略遺漏。
本文待改進的地方是須通過實驗找到合理的時間步和Texe算法的有效性取決于時間的更新步長和Texe,步長越小給出的策略越完善,但這卻拉長了從監(jiān)測到故障到給出防撞策略的時間即Texe如何找到合理的時間步和Texe。是待解決的問題。
參考文獻:
[1] Traffic Accident causation inEurope(TRAcE)FP6—2004一IST一4. Deliverable 1.3 road users and accident causation[EB/0L].[2009一07—21].http://halshs.archives—ouvertes.fr/hal一00545396/.
[2] USA National Highway Traffic Administration(NHTSA).Traffic safety Facts[EB/0L].[2009一08—13].http://www.nrd.nhtsa.dot.gov/Pubs/81 1402EE.pdf.
[3] Tranbbs.com. The nationaI traffic accident statistics[EB/0L].[2012—12—15].http://www.tranbbs.com/Techarticle/TInformation/TechArticle-111913.shtml.(in Chinese)
[4] Dresner K M,stone P.A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research,2008,31(3):591—656.
[5] Desaraju V,Ro H,Yang M,et a1.Partial order techniquesfor vehicIe collision avoidance:Application to an autonomous roundabout test_bed[c]∥Proc of IcRA’09,2009:82—87.
[6] Duperret J,Hafner M R,Vecchio D D.Formal design of a provably safe robotic mundabout system[c]∥Proc of IRos’10,Z010:2006—2011.
[7] Hafner M R,Vecchio D D.Computationaltools for the safety control of a class of piecewise continuous systems with imperfect information on a partial order[J].sIAM Journal of Contr01 and 0ptimization,2011,49(6):2463—2493.
[8] Lygeros J,Tomlin c,Sastry S.contr01lers for reachability specifications for hybrid systems[J].Automatica,1999,35(3):349—370.
[9] CoIombo A,Vecchio D D.Efficient algorithms for collision avoidance atintersections[c]//Proc ofHscc’12,2012;145—154.
[10] C010mbo A,Vecchio D D.supervisory control of differentiaIly flat systems based on abstraction[C]//Proc of cDc—ECE’11。2011:6134—6139.
[11] Kowshik H,caveney D,Kumar P R.ProvabIe systemwide safety in inteIligent intersections[J].IEEE Transactions on Vehicular Technology,2011,60(3):804—818.
[12] Hafner M R,cunningham D,caminiti L,et a1.Automated vehicl}to_vehicle coIlision avoidance at intersections[c] //Proc of WCITS,11,201l:1.