感知是無(wú)人駕駛的核心
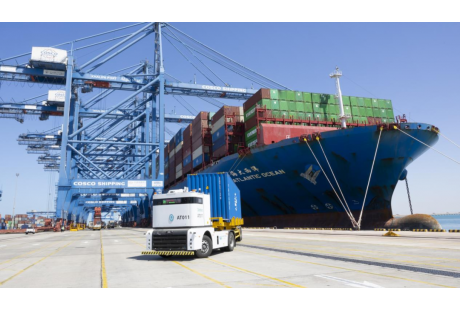
無(wú)人駕駛汽車(chē)依靠人工智能、視覺(jué)計(jì)算、雷達(dá)、監(jiān)控裝置和全球定位系統(tǒng)協(xié)同合作,通過(guò)電腦實(shí)現(xiàn)無(wú)人駕駛,可以在沒(méi)有任何人類(lèi)主動(dòng)的操作下,自動(dòng)安全地操作機(jī)動(dòng)車(chē)輛。
從技術(shù)角度講,自動(dòng)駕駛又分為感知定位、規(guī)劃決策、執(zhí)行控制三個(gè)部分。要實(shí)現(xiàn)自動(dòng)駕駛,除了算法創(chuàng)新、系統(tǒng)融合之外,還需要來(lái)自云平臺(tái)的支持。“感知定位是無(wú)人駕駛汽車(chē)能否上路的關(guān)鍵點(diǎn)。”余崇圣說(shuō),無(wú)人駕駛汽車(chē)必須要能夠識(shí)別交通信號(hào)和標(biāo)志,以及其他汽車(chē)、自行車(chē)和行人,必須能感知前方物體的距離和速度,以便作出對(duì)應(yīng)反應(yīng)。
目前,無(wú)人駕駛汽車(chē)主要通過(guò)攝像頭(長(zhǎng)距攝像頭、環(huán)繞攝像頭和立體攝像頭)和雷達(dá)(超聲波雷達(dá)、毫米波雷達(dá)、激光雷達(dá))實(shí)現(xiàn)感知的。但是不同的傳感器各有利弊。
余崇圣指出,現(xiàn)階段應(yīng)用較多的毫米波雷達(dá),穿透力強(qiáng),成本較低,但探測(cè)距離受到頻段損耗的直接制約,并且對(duì)周邊所有障礙物無(wú)法進(jìn)行精準(zhǔn)的建模。激光雷達(dá)的優(yōu)勢(shì)在于其探測(cè)范圍更廣,探測(cè)精度更高,綜合能力高,但價(jià)格不占優(yōu)。
預(yù)判能力還待發(fā)展
無(wú)人駕駛汽車(chē)上路對(duì)軟件、硬件的穩(wěn)定性和契合程度提出了近乎嚴(yán)苛的要求。由于汽車(chē)駕駛過(guò)程中的場(chǎng)景復(fù)雜、多變,加上交通容量難以預(yù)估,稍有差錯(cuò)就可能付出生命的代價(jià),所以在無(wú)人駕駛中,正確的預(yù)判及操作顯得尤為重要。
而預(yù)判顯然來(lái)自于感知數(shù)據(jù)采集,以及大數(shù)據(jù)的應(yīng)用。余崇圣說(shuō),無(wú)人駕駛汽車(chē)的數(shù)據(jù)采集很大部分依靠傳感器。傳感器將采集的數(shù)據(jù)回傳,經(jīng)過(guò)不斷地收集、分析數(shù)據(jù),讓無(wú)人駕駛汽車(chē)遇到突發(fā)情況時(shí),在盡可能短的時(shí)間內(nèi)做出反應(yīng)。
“可目前來(lái)看,數(shù)據(jù)采集還不足,也影響到了預(yù)判。”他表示,機(jī)器視覺(jué)還需要提升計(jì)算能力和感知能力,以確保采集的數(shù)據(jù)準(zhǔn)確,同時(shí),準(zhǔn)確且大量的數(shù)據(jù)也指導(dǎo)無(wú)人駕駛汽車(chē)做出正確的預(yù)判。
除了技術(shù)瓶頸之外,大家也在擔(dān)心無(wú)人駕駛汽車(chē)上路的法律問(wèn)題。余崇圣認(rèn)為,雖然當(dāng)前的法律法規(guī)還不健全,對(duì)自動(dòng)駕駛的管控還未解決。“現(xiàn)在世界各國(guó)均出臺(tái)了一系列法律法規(guī),可以肯定的是,未來(lái)在車(chē)企、交通部門(mén)等多方面的產(chǎn)業(yè)支撐和政策配合下,法律問(wèn)題不會(huì)是無(wú)人駕駛汽車(chē)上路的最大阻礙。”