科技發(fā)展到今天,自動(dòng)駕駛不再陌生,它已經(jīng)成為汽車產(chǎn)業(yè)與人工智能、物聯(lián)網(wǎng)、高性能計(jì)算等新一代信息技術(shù)深度融合的產(chǎn)物,并且成為全球汽車與交通出行領(lǐng)域智能化發(fā)展的主要方向。
作為未來(lái)汽車工業(yè)的發(fā)展方向,中國(guó)智能駕駛產(chǎn)業(yè)市場(chǎng)規(guī)模預(yù)計(jì)到2020年將達(dá)到1214億元人民幣,前景可期。在未來(lái)國(guó)家智能駕駛相關(guān)政策法規(guī)逐漸成型、行業(yè)內(nèi)技術(shù)不斷完善、中國(guó)智能駕駛企業(yè)積極推動(dòng)應(yīng)用落地的情況下,中國(guó)智能駕駛市場(chǎng)規(guī)模將保持持續(xù)擴(kuò)大趨勢(shì)。
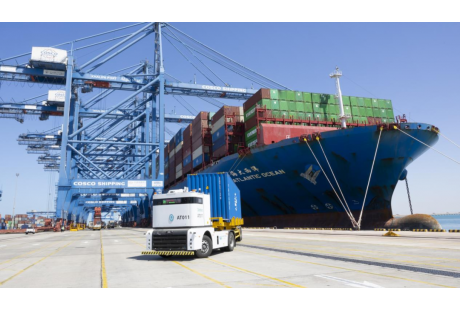
在這之中,中國(guó)公路貨運(yùn)的體量在綜合運(yùn)輸體系中大約超過(guò)70%占比,公路貨運(yùn)司機(jī)群體超過(guò)3000萬(wàn)人。要知道,大型貨運(yùn)車隊(duì)的貨車日均行駛時(shí)間超過(guò)12個(gè)小時(shí),長(zhǎng)時(shí)間駕駛這些龐然大物,對(duì)于貨運(yùn)司機(jī)來(lái)說(shuō)著實(shí)辛苦。
而現(xiàn)在,一些專注于自動(dòng)駕駛的科技企業(yè)希望讓這些“大家伙”自己行駛,從而提升道路運(yùn)輸?shù)墓ぷ餍省K緳C(jī)要做的,則是觀察路面情況,在出現(xiàn)車輛無(wú)法處理的情況時(shí)介入,保證車內(nèi)和車外的安全。
《看得見(jiàn)的未來(lái)》第四期,騰訊新聞節(jié)目走訪了專注于智能駕駛應(yīng)用的圖森未來(lái)和馭勢(shì)科技,我們?cè)噲D從這些正在用科技的力量提升效率和幸福指數(shù)的科技企業(yè)身上,探尋智能駕駛的未來(lái)圖景。
上海的臨港大道是圖森的重要基地,在這里,他們已經(jīng)取得上海測(cè)試牌照的自動(dòng)駕駛重卡正在進(jìn)行路測(cè)。
在這段長(zhǎng)約2.8公里的測(cè)試路段中,包含了正常的行駛執(zhí)行,以及紅綠燈、路口、左右轉(zhuǎn)向這樣的基本道路元素。從2018年10月到現(xiàn)在,圖森研發(fā)的自動(dòng)駕駛重卡每天都在進(jìn)行不間斷的壓力測(cè)試。
測(cè)試中,圖森需要解決的主要問(wèn)題是,讓這臺(tái)自動(dòng)駕駛重卡在不同場(chǎng)景下順暢運(yùn)行,比如在雨天,測(cè)試車輪帶起的雨滴是否回影響到傳感器的效果。
就在最近,圖森對(duì)外發(fā)布了最新的無(wú)人駕駛攝像頭感知系統(tǒng)。該感知系統(tǒng)利用索尼的汽車CMOS圖像傳感器,能讓無(wú)人車在夜間和低能見(jiàn)度下行駛,與圖森的1000米感知技術(shù)結(jié)合后,可將無(wú)人駕駛卡車使用率提高到80%。它的感知系統(tǒng)會(huì)在2019年第二季度量產(chǎn),并于第三季度應(yīng)用在圖森的無(wú)人駕駛卡車上,以提供商業(yè)化運(yùn)輸服務(wù)。
圖森聯(lián)合創(chuàng)始人兼CTO侯曉迪告訴我們,這些卡車傳感器主要采用的是激光雷達(dá)和視覺(jué)相結(jié)合的方案:激光雷達(dá)比較關(guān)注的是近處以及車輛四周的環(huán)境;攝像頭的優(yōu)勢(shì)是可以看到更遠(yuǎn)。他們之前的目標(biāo)是感知到1000米的距離,攝像頭可以通過(guò)不同焦距鏡頭看到遠(yuǎn)近的物體,與傳感器互相彌補(bǔ)對(duì)方的優(yōu)劣勢(shì),融合之后最終才能形成自動(dòng)駕駛車輛。
關(guān)于智能駕駛的分級(jí),業(yè)界目前普遍應(yīng)用的是由SAE International(國(guó)際汽車工程師協(xié)會(huì))制定的,分L1到L5共5個(gè)級(jí)別:
Level 1又稱為Driver Assistance即駕駛員輔助階段,有一項(xiàng)以上駕駛輔助功能,例如車道偏離警告(LDW)、前碰預(yù)警(FCW)等。
Level 2的汽車具有Partial Automation功能即能實(shí)現(xiàn)部分自動(dòng)化。部分自動(dòng)駕駛輔助自動(dòng)駕駛,同時(shí)具備縱向(比如緊急自動(dòng)剎車AEB)和橫向控制功能(比如車道控制、彎道行車),目前已經(jīng)能實(shí)現(xiàn)L2的量產(chǎn)。
Level 3為Conditional Automation即有條件自動(dòng)駕駛、人機(jī)共駕,在某些汽車不能實(shí)現(xiàn)自動(dòng)駕駛的情況下,還是需要駕駛員接管車輛控制權(quán)。
Level 4也稱High Automation即高度自動(dòng)駕駛階段,不需要人的介入,但對(duì)道路和環(huán)境條件有所限定。比較而言,L3在系統(tǒng)出問(wèn)題時(shí)需要人接管,L4階段的汽車在緊急情況下能實(shí)現(xiàn)自動(dòng)處理,自己解決特殊情況。
Level 5的汽車即是無(wú)人駕駛車輛(Full Automation),可以實(shí)現(xiàn)無(wú)限制的任意點(diǎn)對(duì)點(diǎn)無(wú)人駕駛模式。
侯曉迪和他的團(tuán)隊(duì)正是瞄準(zhǔn)了L4這個(gè)級(jí)別。他們之所以一開(kāi)始就認(rèn)準(zhǔn)L4無(wú)人駕駛,是因?yàn)閷?duì)于貨運(yùn)卡車而言,如果不把人作為一個(gè)系統(tǒng)的環(huán)節(jié)去掉,而是要求車上必須配備司機(jī),那就永遠(yuǎn)無(wú)法解決司機(jī)短缺的問(wèn)題,降低運(yùn)貨成本和提升效率也就無(wú)法實(shí)現(xiàn)。而沒(méi)有考慮L5的主要原因在于,侯曉迪認(rèn)為這一級(jí)別的功能不是必須的,因?yàn)樨涍\(yùn)的場(chǎng)景是固定的,不需要做無(wú)限制的道路環(huán)境測(cè)試,并且目前看來(lái)還不具備商業(yè)價(jià)值。
智能駕駛對(duì)人們生活的影響,以一種潤(rùn)物細(xì)無(wú)聲的方式慢慢滲透進(jìn)來(lái)。不僅是剛剛提到的提升運(yùn)輸效率,更重要的是,它還能夠?yàn)榫徑獾缆窊矶绿峁┮患褐Α1热缥覀兛梢园阎悄荞{駛的重卡放在夜間行駛,這樣就能直接避免對(duì)白天擁堵道路資源的占用。
實(shí)際上,在在美國(guó)加州,政府已經(jīng)批準(zhǔn)了無(wú)人出租汽車服務(wù),圖森未來(lái)的自動(dòng)駕駛卡車已經(jīng)在美國(guó)開(kāi)始常態(tài)化運(yùn)營(yíng),在中國(guó)的測(cè)試密度也在逐漸增大。侯曉迪的目標(biāo)聽(tīng)起來(lái)很明確很直接,就是要以最快的速度讓自動(dòng)駕駛技術(shù)在貨運(yùn)領(lǐng)域商業(yè)化。
在馭勢(shì)科技首席生態(tài)創(chuàng)新官邱巍和他的同事的想象中,自動(dòng)駕駛則承載著更多的可能。
這種可能性的最直白體現(xiàn)在出行服務(wù),幫助人或者物從一個(gè)地點(diǎn)移動(dòng)到另一個(gè)地點(diǎn)。而這其中的附加值服務(wù),擁有更多想象空間,比如它可以成為一個(gè)移動(dòng)的包廂,可以是一個(gè)移動(dòng)的咖啡屋,一個(gè)移動(dòng)的地產(chǎn),又或者是一個(gè)移動(dòng)的電子商務(wù)入口。
邱巍認(rèn)為,智能駕駛會(huì)給更多行業(yè)帶來(lái)翻天覆地的變化,人們的衣食住行也將從一種固定的形態(tài)逐漸演變稱移動(dòng)的承載形態(tài)。而這背后所支撐的就業(yè)、經(jīng)濟(jì)管理運(yùn)作方式,都會(huì)隨之發(fā)生改變。
這種思路聽(tīng)起來(lái)著實(shí)令人興奮。事實(shí)上,馭勢(shì)科技的技術(shù)落地和商業(yè)化道進(jìn)展迅速,馭勢(shì)科技已經(jīng)在國(guó)內(nèi)多個(gè)場(chǎng)景常態(tài)化運(yùn)營(yíng),采集了大量數(shù)據(jù)。
馭勢(shì)科技的主要核心產(chǎn)品是由“車腦”和“云腦”組成。“車腦”是集成算法、軟硬件一體的車規(guī)級(jí)智能駕駛控制系統(tǒng),“云腦”作為智能駕駛云端大腦,則涵蓋車輛云端運(yùn)維管理、大數(shù)據(jù)采集分析、高精地圖、建模與仿真、人機(jī)交互等功能模塊。圍繞這個(gè)產(chǎn)品核心,馭勢(shì)科技打造了基于集成算法、硬件、云端數(shù)據(jù)的產(chǎn)品鏈。
在廣西南寧園博園,馭勢(shì)科技的無(wú)人駕駛觀光車在每天開(kāi)園后不久就開(kāi)始運(yùn)營(yíng)。在體驗(yàn)過(guò)程中,當(dāng)觀光車前方的障礙物越來(lái)越近時(shí),它會(huì)探測(cè)到,同時(shí)慢慢減速,然后下發(fā)剎車,直到觀光車完全停止。前后攝像頭還會(huì)用來(lái)檢測(cè)車道線和周邊行人車輛,以及做定位。
與非自動(dòng)駕駛汽車不同,自動(dòng)駕駛汽車要通過(guò)處理車前、車后攝像頭的實(shí)時(shí)視頻,來(lái)識(shí)別其他車輛的存在和判斷車速,并預(yù)測(cè)到其他車輛可能會(huì)出現(xiàn)的加速、減速、變道等行為。這個(gè)過(guò)程需要大量的機(jī)器學(xué)習(xí)和數(shù)據(jù)計(jì)算。
倘若所有車輛都采用自動(dòng)駕駛,那么車與車之間就有可能實(shí)現(xiàn)直接通信,從而可以輕松并準(zhǔn)確地確定車與車之間的相對(duì)位置和速度。
其他車諸如加速、減速、變道這些巡航行為,也不用通過(guò)視頻來(lái)預(yù)測(cè),直接通信交流,這將極大方便車與車之間巡航算法的協(xié)調(diào)。在這個(gè)過(guò)程里,唯一還需要攝像頭的地方可能只是識(shí)別馬路和車道,不過(guò)這些技術(shù)要簡(jiǎn)單很多,現(xiàn)在就已經(jīng)非常成熟。
在人工智能引發(fā)的變革中,自動(dòng)駕駛技術(shù)絕對(duì)算得上是主角之一。隨著技術(shù)的相對(duì)成熟,人類生活與社會(huì)重構(gòu)的序幕或許已經(jīng)被悄然拉起,而這將關(guān)乎社會(huì)中的每一個(gè)人。