資訊機(jī)構(gòu) Navigant Research 最近公布的報(bào)告再次將兩家公司推向風(fēng)口浪尖。一個是在排名中墊底的特斯拉,另一個則是拔得頭籌的 Waymo。至于評判標(biāo)準(zhǔn),是根據(jù)每家公司在「愿景」、「商業(yè)化策略」、「合作方」、「量產(chǎn)計(jì)劃」、「技術(shù)」以及「產(chǎn)品持久力」這幾個方面的綜合表現(xiàn)打分排名。
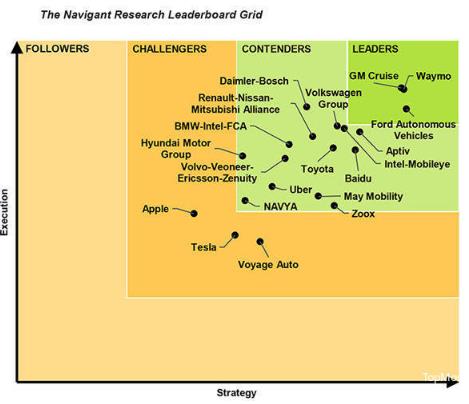
2019 自動駕駛領(lǐng)導(dǎo)力排行榜 / Navigant Research
在去年的報(bào)告中,Waymo 和特斯拉的排名分別為第七位和第十二位。對 Waymo 而言,去年開始的大規(guī)模商業(yè)化試運(yùn)營應(yīng)該是其領(lǐng)先的重要原因。但特斯拉墊底就有點(diǎn)說不過去了,排名竟然比蘋果都低。在一些業(yè)內(nèi)人士看來,這份報(bào)告在成文的視角和方法論上略有偏差,缺失了對「政府關(guān)系」和「數(shù)據(jù)」這兩個重要標(biāo)準(zhǔn)的考量。
和政府搞好關(guān)系的重要性自不必說。一旦硬件實(shí)現(xiàn)商品化,軟件就成了關(guān)鍵。實(shí)際上不能說是軟件,而是「數(shù)據(jù)」。數(shù)據(jù)是驅(qū)動自動駕駛技術(shù)發(fā)展的「燃料」,或者如前英特爾首席執(zhí)行官 Brian Krzanich 提出的觀點(diǎn),「數(shù)據(jù)是新的石油資源」。世界上最先進(jìn)的人工智能也需要數(shù)據(jù)支持——它依靠浩如煙海的數(shù)據(jù)將信息傳化為下一步的行動。
顯然,如果只考慮「科技」和「數(shù)據(jù)收集」這兩個維度,排在榜首的應(yīng)該是 Waymo 和特斯拉。至于誰最終會在這場「曠日持久戰(zhàn)」中勝出,我們暫且不討論。今天想和大家聊聊關(guān)于特斯拉和 Waymo 在技術(shù)層面的一兩點(diǎn)差異性。
「貌合」「神離」的兩套方案
二月底,Waymo 首席科學(xué)家 Drago Anguelov 在 MIT 首次開講,他分享的內(nèi)容主題為「解決自動駕駛中的長尾問題」(Taming The Long Tail of Autonomous Driving Challenges),這應(yīng)該是外界對 Waymo 自動駕駛研發(fā)目前能夠了解到的最深度、最詳細(xì)的內(nèi)容了。
近些年,使用大量標(biāo)注過的數(shù)據(jù)對深度學(xué)習(xí)網(wǎng)絡(luò)進(jìn)行監(jiān)督訓(xùn)練,使得物體感知和行為預(yù)測能力有了大幅提升,這些技術(shù)在 Waymo 自動駕駛開發(fā)過程中得到了大規(guī)模應(yīng)用。我們也從 Drago Anguelov 口中第一次知道了 Waymo 在使用「模仿學(xué)習(xí)(imitation learning)」,這里先稍微科普一下。
模仿學(xué)習(xí)屬于機(jī)器學(xué)習(xí)的一種,它的神經(jīng)網(wǎng)絡(luò)能夠通過「觀察」人類的行為將某些特定的動作和場景進(jìn)行匹配。如果使用不同類型的「人類行為」作為數(shù)據(jù)源來訓(xùn)練,最終神經(jīng)網(wǎng)絡(luò)就能夠根據(jù)感知的結(jié)果輸出相對應(yīng)的決策動作。例如,「如果你看到停車標(biāo)志,馬上停車」、「如果前方有輛停著的車擋路了,繞開它」等等。
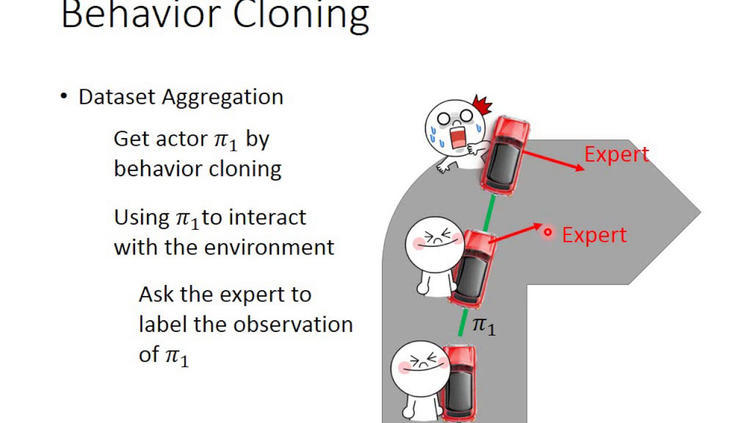
「行為克隆」(behaviour cloning)與「模仿學(xué)習(xí)」(imitation)是一回事 /
隨著商業(yè)化試運(yùn)營的推進(jìn),谷歌能夠采集數(shù)據(jù)的場景更多了,模仿學(xué)習(xí)算法也就有了更頻繁的用處。但 Drago Anguelov 也指出,人類駕駛行為存在著很多不確定性,一些罕見的場景(所謂的「長尾」問題),Waymo 的數(shù)據(jù)集中并沒有足夠的案例來訓(xùn)練算法應(yīng)對。出現(xiàn)這種情況就只能依靠開發(fā)人員手動編寫算法。Drago 認(rèn)為這種「折中」的做法遲早是會被機(jī)器學(xué)習(xí)代替的。
根據(jù) Waymo 官方披露的數(shù)據(jù),Waymo 目前已經(jīng)累積了約 1500 萬英里的行駛里程。按照平均每 3000 萬英里才會出現(xiàn)一起事故的概率來計(jì)算的話,Waymo 可能到現(xiàn)在都沒有得到一個特定的「長尾」案例。假設(shè)行駛每 100 萬英里會發(fā)生一起事故,waymo 也不過積累了 15 個數(shù)據(jù)而已。按照普通機(jī)器學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)需要的數(shù)據(jù)量(每個圖像分類需要至少 1000 個樣本)的標(biāo)準(zhǔn)來看,Waymo 似乎還差得有些遠(yuǎn)。
盡管 Drago Anguelov 表示希望通過采集盡可能多的人類駕駛行為(包括「長尾」案例)來進(jìn)行模仿學(xué)習(xí),但「數(shù)據(jù)量的缺失」是個很大的問題。
而為了彌補(bǔ)這方面的缺陷,Waymo 已經(jīng)構(gòu)建出了一套仿真模型,仿真出盡可能多的場景來進(jìn)行測試。因?yàn)橛袝r(shí)會得出截然相反的結(jié)果,所以要加強(qiáng)系統(tǒng)的魯棒性,做出足夠多的仿真模型,確保系統(tǒng)的準(zhǔn)確性。
不過仿真模型的建立依然需要真實(shí)世界數(shù)據(jù)的支持,解決「長尾」問題也需要對人類駕駛行為進(jìn)行大量地模仿學(xué)習(xí)。所以這就又回到了問題的原點(diǎn),Waymo還需要更大量級「數(shù)據(jù)」的支持。
對比之下,似乎「差生」特斯拉在「數(shù)據(jù)」問題上還真是不發(fā)愁。
特斯拉目前預(yù)計(jì)有超過 40 萬輛搭載了 Autopilot 系統(tǒng)的車子在道路上行駛,單日行駛里程超過了 1300 萬英里。如果未來這個車隊(duì)的規(guī)模增加至超過 100 萬輛,那么每月產(chǎn)生的有效行駛里程將到達(dá) 10 億英里的量級。對一家已經(jīng)有成熟產(chǎn)品落地的車企而言,這種真實(shí)世界產(chǎn)生的「數(shù)據(jù)」根本不是問題。
至于特斯拉在自動駕駛研發(fā)上的獨(dú)特性,根據(jù)外媒 The Information 曾經(jīng)透露的信息,特斯拉同樣在利用「里程累積」上的優(yōu)勢進(jìn)行模仿學(xué)習(xí)。原文(https://0x9.me/yRgBO)是這么說的:
據(jù)熟悉特斯拉這套系統(tǒng)的線人爆料稱,特斯拉的車子在行駛過程中會將攝像頭及其他傳感器的數(shù)據(jù)搜集起來,Autopilot 是否運(yùn)行并沒有關(guān)系。之后工程師可以將這些數(shù)據(jù)中人類的駕駛行為與不同的場景進(jìn)行匹配,之后遇到類似的場景機(jī)器就可以模仿人類去執(zhí)行。比如怎樣拐彎或躲避障礙物。當(dāng)然這種被叫做「行為克隆」的方法也有局限性,但特斯拉的工程師認(rèn)為只要有足夠的數(shù)據(jù)支撐,神經(jīng)網(wǎng)絡(luò)就能夠給出正確的決策結(jié)果,例如在絕大多數(shù)場景中如何轉(zhuǎn)向、剎車以及加速。在特斯拉看來,未來不再需要人類手動編程控制無人車應(yīng)對特定場景。
不過按照個人的理解,特斯拉軟件工程師提到的「行為克隆」和 Waymo 的「模仿學(xué)習(xí)」是一個意思,等同于大家都在講的「端到端學(xué)習(xí)」的方案,即使用一個巨大的神經(jīng)網(wǎng)絡(luò),輸入傳感器數(shù)據(jù)后得到關(guān)于轉(zhuǎn)向、加速和剎車的整體執(zhí)行策略。
假設(shè)特斯拉采用的是端到端學(xué)習(xí)方案,那它肯定是不需要對圖像進(jìn)行標(biāo)記的。唯一需要「標(biāo)記」的是人類駕駛員的行為,比如轉(zhuǎn)向角是多少、加減速的力度等。將整個傳感器數(shù)據(jù)輸入到一個巨大的神經(jīng)網(wǎng)絡(luò)后,系統(tǒng)會學(xué)習(xí)如何將傳感器數(shù)據(jù)與人類駕駛員的行為進(jìn)行匹配。但我們知道特斯拉是在做圖片標(biāo)記的,所以從這一點(diǎn)出發(fā)考慮,它采用的就不大可能是和 Waymo 一樣的「端到端學(xué)習(xí)」的策略。
針對自動駕駛感知的算法差異,Mobileye 創(chuàng)始人 Amnon Shashua 曾經(jīng)對「端到端學(xué)習(xí) (End-to-End Learning)」和「語義抽象(Semantic Abstraction)」這兩個概念做過詳細(xì)的講解。
而根據(jù)外媒 The Information 報(bào)道的內(nèi)容來推斷,特斯拉可能是在開發(fā)一套用于路徑規(guī)劃或執(zhí)行控制的神經(jīng)網(wǎng)絡(luò)。而用來訓(xùn)練這套神經(jīng)網(wǎng)絡(luò)的數(shù)據(jù)并非來自傳感器,而是由感知神經(jīng)網(wǎng)絡(luò)輸出的元數(shù)據(jù)。這樣人類駕駛員的直接行為—轉(zhuǎn)向、加速和剎車可以對元數(shù)據(jù)進(jìn)行「標(biāo)記」,類似端到端學(xué)習(xí)中,駕駛行為與傳感器數(shù)據(jù)的匹配。
這種將感知層和執(zhí)行層神經(jīng)網(wǎng)絡(luò)分開的做法能夠規(guī)避 Shashua 教授上面提到的端到端學(xué)習(xí)可能產(chǎn)生的一系列問題:如「不常見場景」出現(xiàn)的幾率會大幅下降;對先備知識(Prior Knowledge)的要求提高,深度神經(jīng)網(wǎng)絡(luò)在解決一些簡單問題上可能會「慘敗」。
如果上面猜測正確的話,這種方法可以用相當(dāng)快的速度來解決路徑規(guī)劃和執(zhí)行控制方面的問題。考慮到目前搭載硬件 2.0 版本的特斯拉車型每個月可以獲得近 10 億英里的行駛里程,獲得的數(shù)據(jù)量之大是 Waymo 無法企及的。之后硬件 3.0 版本上線后,搭載了 AI 芯片的這套系統(tǒng)會更有利于特斯拉算法的迭代。
一場馬拉松式的長跑
盡管Waymo深受「數(shù)據(jù)」的困擾,但光憑對這個維度的考量自然是沒辦法斷言什么的。只不過Waymo要解決自動駕駛中的「長尾」問題,自然需要更多的數(shù)據(jù)支持。Waymo近日宣布將在亞利桑那州的梅薩市開設(shè)新的技術(shù)服務(wù)中心,進(jìn)一步擴(kuò)大無人車出行服務(wù)的規(guī)模。顯然Waymo是奔著搜集更多「數(shù)據(jù)」的目的來的。

基于克萊斯勒 Pacifica 車型打造的 Waymo 自動駕駛原型車 / Waymo
也有人認(rèn)為,Waymo可以效仿特斯拉開發(fā)一套類似Autopilot的駕駛輔助系統(tǒng),僅使用成本低廉可量產(chǎn)的傳感器。一旦在市場鋪開后,搜集真實(shí)場景的駕駛數(shù)據(jù)也就不是什么難事了。當(dāng)然,Waymo自己要完成這件事比較困難,肯定需要來自主機(jī)廠領(lǐng)域的合作伙伴。
上周有消息稱,「Waymo正在尋求外部投資人」。意料之中的計(jì)劃。如果有車企成為Waymo的股東,要獲得海量的駕駛數(shù)據(jù)自然容易得多。而且Waymo作為自動駕駛解決方案的供應(yīng)商,始終只有借助OEM的平臺才能最終獲得商業(yè)化成功。不管是手中的全棧自動駕駛技術(shù)亦或是正在進(jìn)行的移動出行業(yè)務(wù),Waymo對很多車企而言,都是有十足吸引力的合作伙伴。Cruise和通用、福特與Argo.AI,這些都是比較成功的先例。
對特斯拉而言,之前因?yàn)镸odel 3陷入「量產(chǎn)地獄」,Autopilot的研發(fā)進(jìn)程似乎出現(xiàn)了停滯,硬件3.0也遲遲沒有發(fā)布。盡管在「數(shù)據(jù)」容量上有先天優(yōu)勢,但率先量產(chǎn)以及頻發(fā)的幾次事故使其屢陷輿論風(fēng)波。所以,特斯拉在自動駕駛上到底能有怎樣的成就,還在還很難說。
不過我個人倒是蠻欣賞之前馬斯克說過的一段話。
他說,「我不認(rèn)為哪家企業(yè)能在特斯拉之前打造出一套綜合性的自動駕駛解決方案。除非它們保密工作做得太好了,到時(shí)候要拿出驚人的成果來。我覺得這種可能性不大,對特斯拉而言,任何車企都不是我們的競爭對手」。
希望這種「目中無人」的狂妄自大,可以給特斯拉帶來點(diǎn)好運(yùn)氣。